
Transformación de perspectiva
AREAtutorial » Tutoriales de Ingeniería » Transformación de perspectiva
Cuando los ojos humanos ven objetos de cerca, parecen más grandes en comparación con los que están lejos. En general, esto se llama perspectiva. Mientras que la transformación es la transferencia de un objeto, etc. De un estado a otro.
Por lo tanto, la transformación de perspectiva está asociada con la transformación de un mundo tridimensional en una imagen bidimensional. El mismo principio por el que funciona la visión humana y el mismo principio por el que funciona la cámara.
Veremos más de cerca por qué sucede esto: los objetos que están cerca de usted se ven más grandes y los que están lejos se ven más pequeños, incluso si parecen más grandes cuando se acerca a ellos.
Comenzaremos esta discusión con el concepto de marco de referencia:
Un marco de referencia es básicamente un conjunto de valores con los que medimos algo.
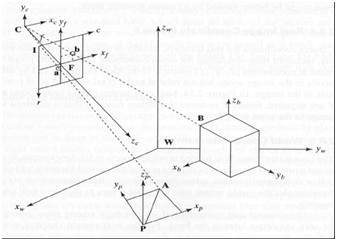
Para analizar un mundo / imagen / escena 3D, se requieren 5 marcos de referencia diferentes.
El marco de objeto se utiliza para modelar objetos. Por ejemplo, comprobar si un objeto en particular está en el lugar correcto en relación con otro objeto. Es un sistema de coordenadas 3D.
El sistema de coordenadas mundial se utiliza para objetos interconectados en el mundo 3D. Es un sistema de coordenadas 3D.
El marco de coordenadas de la cámara se utiliza para encajar objetos en la cámara. Es un sistema de coordenadas 3D.
No es un sistema de coordenadas 3D, sino un sistema 2D. Se utiliza para describir cómo se muestran los puntos 3D en el plano de una imagen 2D.
También es un sistema de coordenadas 2D. Cada píxel tiene un valor de coordenadas de píxel.

Esto convierte una escena 3D en una 2D con píxeles.
Ahora explicaremos este concepto matemáticamente.
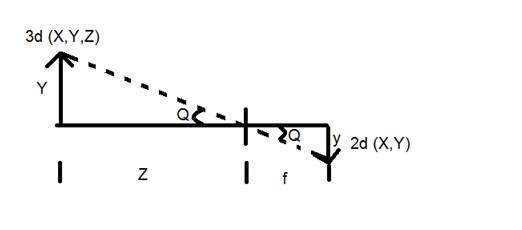
Dónde
Y = objeto 3D
y = imagen 2d
f = distancia focal de la cámara
Z = distancia entre el objeto y la cámara
Ahora hay dos ángulos diferentes formados en esta transformación, que están representados por Q.
Primera esquina
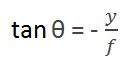
Donde menos significa que la imagen está al revés. Segunda esquina formada:
![]()
Comparando estas dos ecuaciones, obtenemos
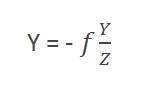
A partir de esta ecuación, podemos ver que cuando los rayos de luz se reflejan después de ser golpeados por un objeto que ha pasado de la cámara, se forma una imagen invertida.
Podemos entender esto mejor con este ejemplo.
por ejemplo
Supongamos que se tomó una imagen de una persona de 5 m de altura, parada a una distancia de 50 m de la cámara, y tenemos que decir que el tamaño de la imagen de una persona con una cámara con una distancia focal de 50 mm.
Dado que la distancia focal está en milímetros, tenemos que convertir todo a milímetros para poder calcularlos.
Asi que,
Y = 5000 mm.
f = 50 mm.
Z = 50.000 mm.
Sustituyendo los valores en la fórmula, obtenemos

= -5 mm.
Nuevamente, un signo menos indica que la imagen está al revés.
🚫